The list below highlights my publications during and before my Ph.D. For an updated list of my most recent publications, please see my Google Scholar.
Michael Chang - Ph.D. Research
I graduated from my Ph.D. from Berkeley AI Research (BAIR) in 2023, advised by Professors Sergey Levine and Tom Griffiths, and funded by the NSF Graduate Research Felowship. My dissertation talk can be found here.
During my Ph.D., I was fortunate to have interned at DeepMind and Meta AI. Besides my Ph.D. advisors, I have been fortunate to have received mentorship from Jürgen Schmidhuber, Josh Tenenbaum, Antonio Torralba, Honglak Lee, Will Whitney, Tejas Kulkarni, Ruben Villegas, and Yuting Zhang, who helped me begin my path into AI research.
For more about my current work, see my main page.
Google Scholar / LinkedIn / Github / Twitter / Goodreads / Swimming / Cameo
|
Our neural networks today are strikingly similar to what computing was like a hundred years ago. Back then we designed specialized electronic circuits for each different task; in the past decade we have been training specialized neural circuits for each different task. In the 1940s we developed the von Neumann architecture for computing; now our retrieval augmented transformers are doing essentially the same thing. Just as software abstractions were key to scaling our electronic circuits to the modern software stack, I believe that to shift artificial intelligence research from building learning circuits to building learning software, we also need to invent the analog of software abstractions for neural networks. My research is on what I call neural software abstractions: understanding the principles that make abstractions in traditional software powerful, and translating these principles into deep learning algorithms to enable neural learners to construct their own abstractions for modeling and manipulating systems. Examples include:
|
|
|
|
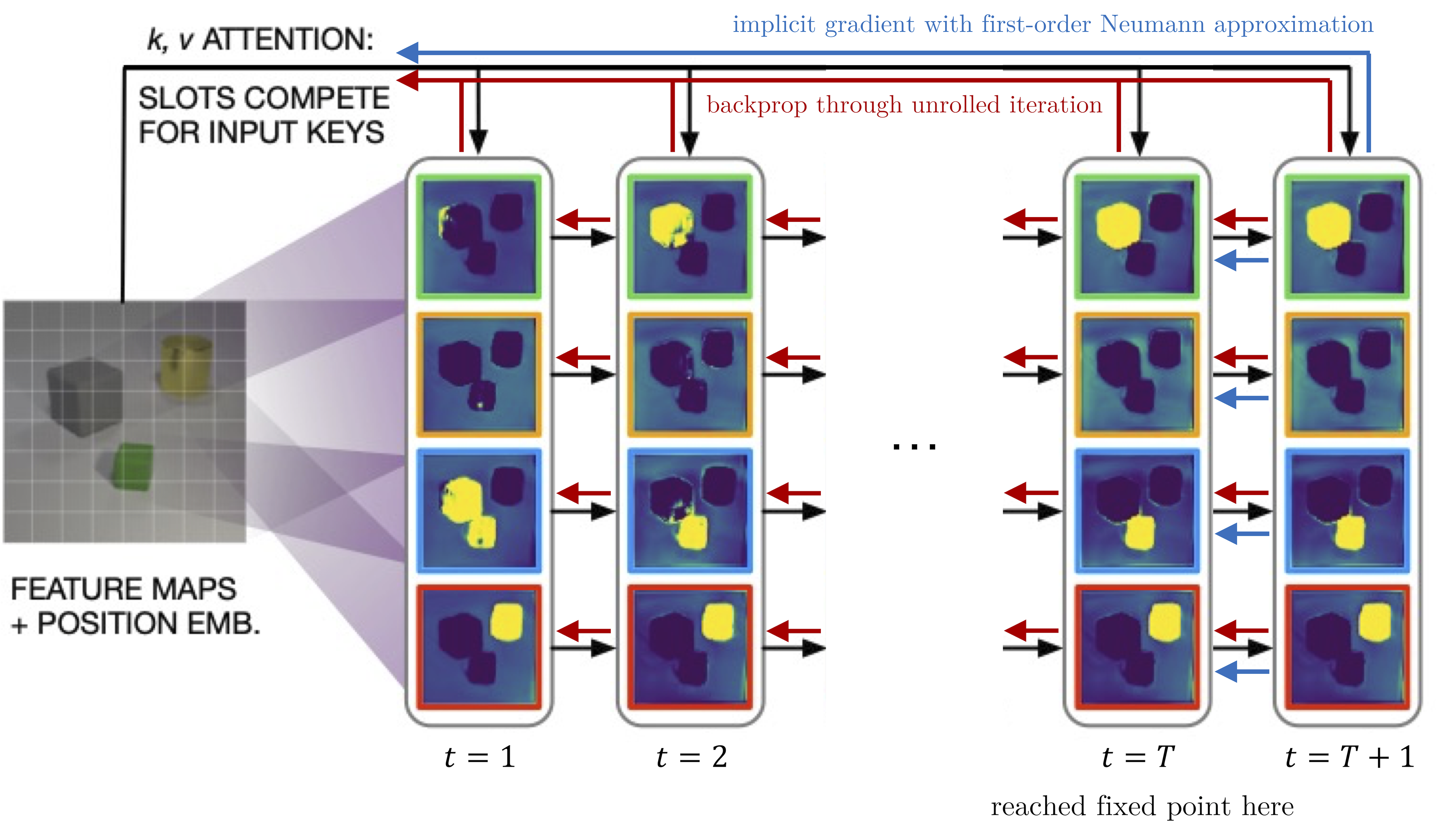
Object Representations as Fixed Points: Training Iterative Inference Algorithms with Implicit Differentiation
Deep generative models, particularly those that aim to factorize the observations into discrete entities (such as objects), must often use iterative inference procedures that break symmetries among equally plausible explanations for the data. Such inference procedures include variants of the expectation-maximization algorithm and structurally resemble clustering algorithms in a latent space. However, combining such methods with deep neural networks necessitates differentiating through the inference process, which can make optimization exceptionally challenging. We observe that such iterative amortized inference methods can be made differentiable by means of the implicit function theorem, and develop an implicit differentiation approach that improves the stability and tractability of training such models by decoupling the forward and backward passes. This connection enables us to apply recent advances in optimizing implicit layers to not only improve the stability and optimization of the slot attention module in SLATE, a state-of-the-art method for learning entity representations, but do so with constant space and time complexity in backpropagation and only one additional line of code. |
|
Modularity in Reinforcement Learning via Algorithmic Independence in Credit Assignment
Many transfer problems require re-using previously optimal decisions for solving new tasks, which suggests the need for learning algorithms that can modify the mechanisms for choosing certain actions independently of those for choosing others. However, there is currently no formalism nor theory for how to achieve this kind of modular credit assignment. To answer this question, we define modular credit assignment as a constraint on minimizing the algorithmic mutual information among feedback signals for different decisions. We introduce what we call the modularity criterion for testing whether a learning algorithm satisfies this constraint by performing causal analysis on the algorithm itself. We generalize the recently proposed societal decision-making framework as a more granular formalism than the Markov decision process to prove that for decision sequences that do not contain cycles, certain single-step temporal difference action-value methods meet this criterion while all policy-gradient methods do not. Empirical evidence suggests that such action-value methods are more sample efficient than policy-gradient methods on transfer problems that require only sparse changes to a sequence of previously optimal decisions. |
|
Decentralized Reinforcement Learning: Global Decision-Making via Local Economic Transactions
We develop the societal decision-making framework in which a society of primitive agents buy and sell to each other the right to operate on the environment state in a series of auctions. We prove that the Vickrey auction mechanism can be adapted to incentive the society to collectively solve MDPs as an emergent consequence of the primitive agents optimizing their own auction utilities. We propose a class of decentralized reinforcement learning algorithms for training the society that uses credit assignment that is local in space and time. The societal decision-making framework and decentralized reinforcement learning algorithms can be applied not only to standard reinforcement learning, but also for selecting options in semi-MDPs and dynamically composing computation graphs. We find evidence that suggests the potential advantages of a society’s inherent modular structure for more efficient transfer learning. |
|
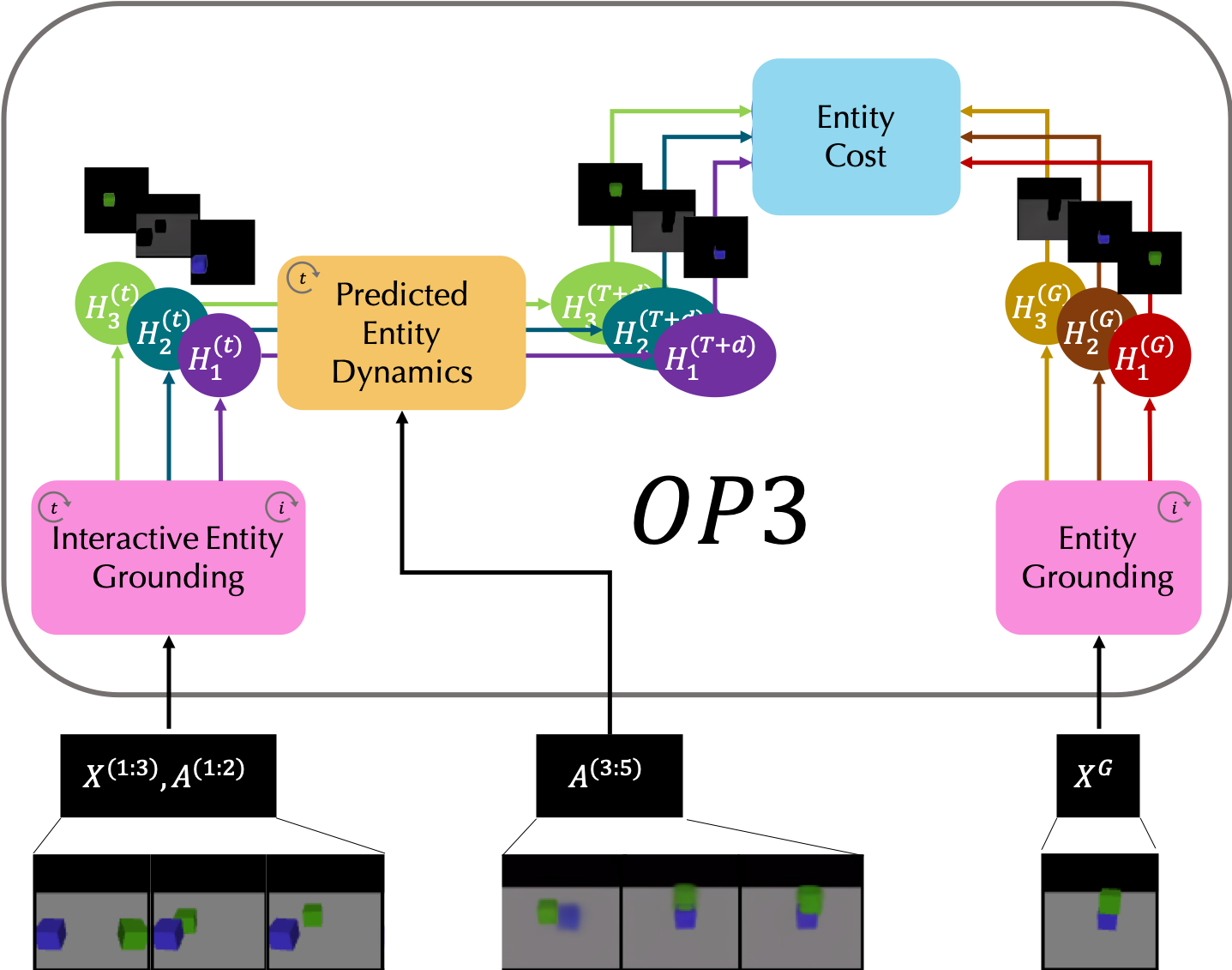
Entity Abstraction in Visual Model-Based Reinforcement Learning
We present object-centric perception, prediction, and planning (OP3), which to the best of our knowledge is the first entity-centric dynamic latent variable framework for model-based reinforcement learning that acquires entity representations from raw visual observations without supervision and uses them to predict and plan. OP3 enforces entity-abstraction -- symmetric processing of each entity representation with the same locally-scoped function -- which enables it to scale to model different numbers and configurations of objects from those in training. Our approach to solving the key technical challenge of grounding these entity representations to actual objects in the environment is to frame this variable binding problem as an inference problem, and we developing an interactive inference algorithm that uses temporal continuity and interactive feedback to bind information about object properties to the entity variables. |
|
MCP: Learning Composable Hierarchical Control with Multiplicative Compositional Policies
We propose multiplicative compositional policies (MCP), a method for learning reusable motor skills that can be composed to produce a range of complex behaviors. Our method factorizes an agent's skills into a collection of primitives, where multiple primitives can be activated simultaneously via multiplicative composition. This flexibility allows the primitives to be transferred and recombined to elicit new behaviors as necessary for novel tasks. We demonstrate that MCP is able to extract composable skills for highly complex simulated characters from pre-training tasks, such as motion imitation, and then reuse these skills to solve challenging continuous control tasks, such as dribbling a soccer ball to a goal, and picking up an object and transporting it to a target location. |
|
Doing more with less: meta-reasoning and meta-learning in humans and machines
Artificial intelligence systems use an increasing amount of computation and data to solve very specific problems. By contrast, human minds solve a wide range of problems using a fixed amount of computation and limited experience. We identify two abilities that we see as crucial to this kind of general intelligence: meta-reasoning (deciding how to allocate computational resources) and meta-learning (modeling the learning environment to make better use of limited data). We summarize the relevant AI literature and relate the resulting ideas to recent work in psychology. |

|
Automatically Composing Representation Transformations as a Means for Generalization
This paper connects and synthesizes ideas from reformulation, metareasoning, program induction, hierarchical reinforcement learning, and self-organizing neural networks. The key perspective of this paper is to recast the problem of generalization to a problem of learning algorithmic procedures over representation transformations: discovering the structure of a family of problems amounts to learning a set of reusable primitive transformations and their means of composition. Our formulation enables the learner to learn the structure and parameters of its own computation graph with sparse supervision, make analogies between problems by transforming one problem representation to another, and exploit modularity and reuse to scale to problems of varying complexity. |
|
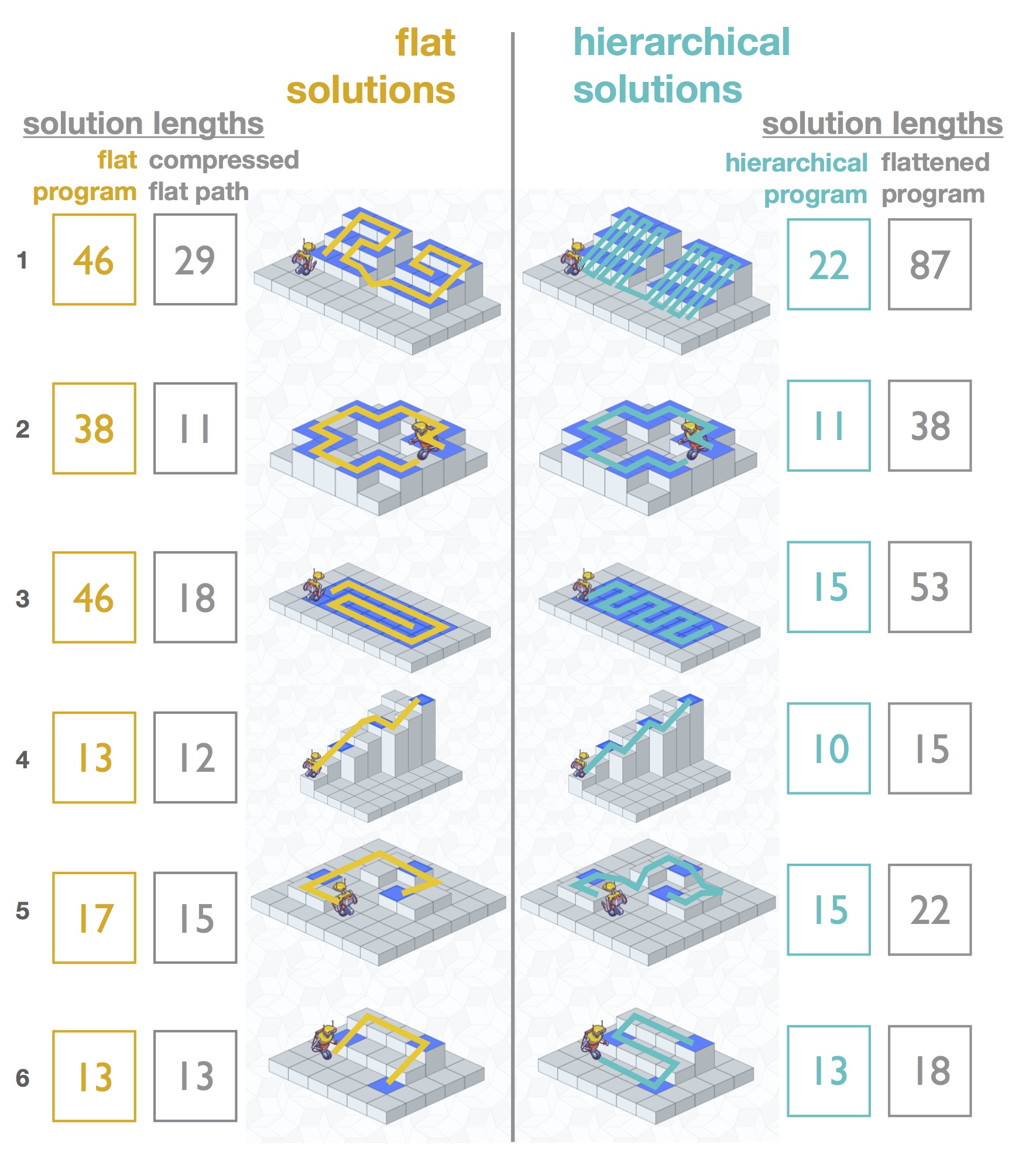
Representational Efficiency Outweighs Action Efficiency in Human Program Induction
This paper introduces Lightbot, a problem-solving domain that explores the link between problem solving and program induction. This paper departs from work in hierarchical learning that hypothesize that hierarchies accelerates the discovery of shortest-path solutions to a problem by segmenting the solution into subgoals. Instead, we investigate a setting in which the hierarchical solutions that humans discover minimize the complexity of the underlying program that generated the solution rather than minimize the length of the solution itself. |

|
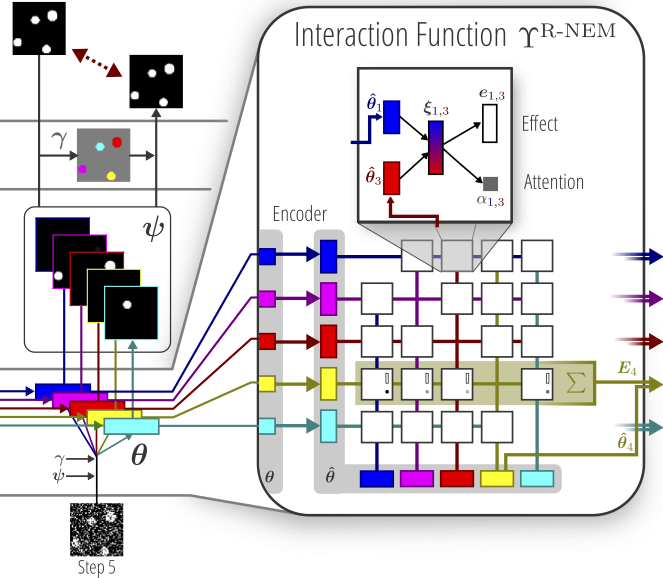
Relational Neural Expectation Maximization: Unsupervised Discovery of Objects and their Interactions
We present a novel method that learns to discover objects and model their physical interactions from raw visual images in a purely unsupervised fashion. It incorporates prior knowledge about the compositional nature of human perception to factor interactions between object-pairs and learn efficiently. On videos of bouncing balls we show the superior modeling capabilities of our method compared to other unsupervised neural approaches that do not incorporate such prior knowledge. |
|
Relational Neural Expectation Maximization
We propose a novel approach to common-sense physical reasoning that learns physical interactions between objects from raw visual images in a purely unsupervised fashion. Our method incorporates prior knowledge about the compositional nature of human perception, enabling it to discover objects, factor interactions between object-pairs to learn efficiently, and generalize to new environments without re-training. |
|
A Compositional Object-Based Approach to Learning Physical Dynamics
The Neural Physics Engine (NPE) frames learning a simulator of intuitive physics as learning a compositional program over objects and interactions. This allows the NPE to naturally generalize across variable object count and different scene configurations. |
|
Understanding Visual Concepts with Continuation Learning
This paper presents an unsupervised approach to learning factorized symbolic representations of high-level visual concepts by exploiting temporal continuity in the scene. |